Opening the Black Box of Deep Neural Networks with more information
Introduction and related work
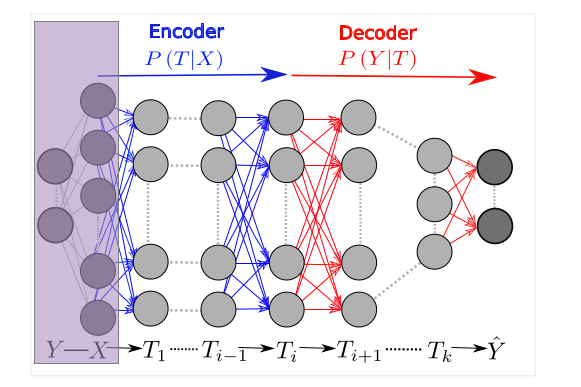
Information funnel model of neural networks
Although neural networks have proven to be invaluable in research as well as in automating various business processes, a lot of questions remain open as to how they work and why they are so effective. One model developed (by Shwartz Ziv, Tishby) to answer them is the information plane
From a statistical point of view, the data \(X\) and labels \(Y\) used to train a neural network that outputs prediction \(\hat Y\) are two random variables drawn from some unknown distribution. The activation value (output of the activation function) of each layer of the network \(T_i \in \{T_1,T_2,…,T_n=\hat Y\}\) is a function of \(X\) and, thus, a random variable as well.
As a way to understand this sequence of random variables, the original paper by Schwartz-Ziv and Tishby proposes using mutual information:
\[ MI(X;Y) = - \sum_{x,y} p(x,y) \log \frac{p(x,y)}{p(x)p(y)} \]
where \(X\),\(Y\) are distributions and \(p(x)\), \(p(y)\), \(p(x,y)\) are probability mass functions
Every layer \(T_i\) of a neural network thus is a point in the information plane: \((MI(X;T_i),MI(T_i;Y))\) where \(MI(X;T_i) \geq MI(X; T_{i+1})\) and \(MI(T_i; Y) \geq MI(T_{i+1};Y)\). This gives rise to an intuitive model of neural network being an information funnel that layer by layer extracts the most relevant (informative of \(Y\)) information out of \(X\) and discards the rest.
Schwartz-Ziv and Tishby present certain that support the information funnel model as well as demonstrate that the process of Stochastic Gradient Descent for a neural network tends to decompose into 2 stages:
- Fitting the network to the data (“moving the funnel”). During this stage \(MI(\hat Y; Y)\) and \(MI(\hat Y; X)\) grow.
- Compressing the output of the network (“shrinking the funnel”). During this stage \(MI(\hat Y; Y)\) grows slower and \(MI(\hat Y; X)\) shrinks.
Our goal in this project is to replicate these experiments as well as further explore this model with our own tools and experiments
Experiments
Please note, that we ran a lot more than 3 experiments in the process of preparing this report, but here we omit small modifications of experimental setup that don’t change the output as they are remarkably not interesting to read
Estimating mutual information
According to the formula
\[ MI(X;Y) = - \sum_{x,y} p(x,y) \log \frac{p(x,y)}{p(x)p(y)} \]
in order to estimate the mutual information between \(X\), \(Y\) and a layer, one simply needs to estimate \(p(x)\), \(p(y)\) and \(p(x,y)\) for all \(x\) and \(y\). Thus, we need The following procedure is used (but not described, one has to look through the code attached to the paper to find that out) in the original paper:
- Given dataset X, Y estimate \(p(x)=\frac{\text{count}(X=x)}{\text{count}(X)}\), \(p(y)=\frac{\text{count}(Y=y)}{\text{count}(Y)}\) as well as joint \(p(x,y)=\frac{\text{count}(X=x,Y=y)}{\text{count}(X,Y)}\)
- Run all data points \(x\) in \(X\) through the neural network, obtain \(T_i\) for all \(i\)
- Repeat step 1 for every (\(T_i\), \(X\))
Note that this approach requires all random variales to be discrete, hence the activation values of neurons have to be discretized
Because the procedure is not described in the paper and the code is very hard to parse, we had to give up the idea of re-implementing it and make heavy use of it’s API. However, we did implement an improvement upon the original estimation approach:
Extended MI estimator
The model described above treats \(X\), \(Y\) and \(T_i\) as random variables, but assumes the function \(T(X)\) is completely deterministic. Which it is not, because we are training the neural network with stochastic gradient descent: every time we retrain it, the results will be slightly different.
We have implemented an MI estimator that accounts for this. Instead of working with one neural network, we can train several and sample elements of \(T_i\) (activation values of neurons) randomly from several \(T_{ij}\) (\(i\) - layer, \(j\) - index). From now on, this will be called extended MI estimator and the original approach with one network - simple MI estimator. We will demonstrate the benefits of this approach further.
Experimental setup
Every experiment was conducted as follows:
- Several copies of a neural network with identical architecture (number, size and type of layers) are created.
- They are trained iteratively using pytorch implementation of Stochastic Gradient Descent
- After each iteration of the algorithm, the full procedure extended MI estimator is run and the estimated mutual information \(MI(X;T_i)\), \(MI(T_i;Y)\) is plotted on a graphical representation fo the information plane
Note that MI estimation is much more resource intensive than SGD itself and it doesn’t run on the GPU. For this reason, going from primitive multi-layer perceptrons to experiments with more complicated neural networks is very hard.
In athe companion github repository to this post, 2 files are attached:
- information_process.py contains methods for estimating mutual information. This code was made available by the authors of the original paper: we claim no credit for it.
- experimental_setup.py contains our tools for setting up experiments
import numpy as np
import torch.optim
import torch
import torch.nn as nn
from torch.autograd import Variable
from experimental_setup import ZivInformationPlane, BufferedSequential, mutual_information_for_network_family, ReshapeLayer
from tqdm import tqdm
import copy
import matplotlib.pyplot as plt
from IPython import display
%matplotlib inline
def experiment(base_network, X, y,
epochs=100, lr=.2, batch_size=101,
network_copies=1,
plot='dynamic',
activation_bins=np.linspace(-1,1,50)):
loss = torch.nn.MSELoss()
network_copies = [copy.deepcopy(base_network) for _ in range(network_copies)]
solvers = [torch.optim.SGD(params=network.parameters(), lr=lr) for network in network_copies]
infoplane = ZivInformationPlane(X, y, bins=activation_bins)
if plot == 'dynamic' or plot == 'once':
fig = plt.figure(figsize=(12,5))
graph = fig.add_subplot(111)
graph.set_xlabel('I(X;T)')
graph.set_ylabel('I(Y;T)')
if plot == 'once':
mi_history = [[] for _ in range(base_network.n_buffers)]
for epoch in tqdm(range(epochs)):
for network, solver in zip(network_copies, solvers):
slice_ = np.random.permutation(range(len(X)))[:batch_size]
X_batch = Variable(torch.from_numpy(X[slice_])).float()
y_batch = Variable(torch.from_numpy(y[slice_, np.newaxis])).float()
solver.zero_grad()
pred_batch = network(X_batch)
loss(pred_batch, y_batch).backward()
solver.step()
mi = mutual_information_for_network_family(infoplane, network_copies)
if plot == 'dynamic':
graph.scatter(*zip(*mi), s=10, c=np.linspace(0, 1, base_network.n_buffers), alpha=epoch/epochs)
display.clear_output(wait=True)
display.display(fig)
elif plot == 'once':
for history, new_point in zip(mi_history, mi):
history.append(new_point)
if plot == 'once':
for history in mi_history:
graph.plot(*zip(*history))
return network_copies
Data
In order to replicate Tishby an Schwartz-Ziv’s original experiment, we’ll generate synthetic test data using a simple binary decision function with small Gaussian noise
X = np.random.randint(5, size=(1000, 12)) - 1
y = (np.mean(X, axis=1) + np.random.normal(scale=0.1, size=1000) > 0.7).astype(np.int)
Y = y.reshape(-1, 1)
And another, more complicated decision function, in order to compare the results.
y_complicated = np.sum(X[:,2::2] * X[:,3::2]) - X[:,0] * X[:,0]
y_complicated = y_complicated + np.random.normal(size=1000, scale=0.2) > np.mean(y_complicated)
y_complicated = y_complicated * 2 - 1
Y_complicated = y_complicated.reshape(-1, 1)
And finally, MNIST dataset of hand-written digits, to test if the results generalize from the synthetic dataset to a more realistic one
import sklearn.datasets as datasets
mnist = datasets.fetch_mldata('MNIST original', data_home='data')
index = np.random.randint(mnist.data.shape[0], size=1000)
X_mnist = mnist.data[index]
X_mnist = X_mnist.reshape(-1, 28, 28)
X_mnist = X_mnist[:,0::2,0::2] + X_mnist[:,1::2,0::2] + X_mnist[:,0::2,1::2] + X_mnist[:,1::2,1::2]
X_mnist = (X_mnist / 20).astype(np.int64).reshape(-1, 14 * 14)
y_mnist = mnist.target[index]
Y_mnist = np.zeros((y_mnist.shape[0], 10))
Y_mnist[np.arange(y_mnist.shape[0]), y_mnist.astype(np.int)] = 1
Experiment 1: Warm up
Two-layer perceptron, simple MI estimator, simple synthetic data
layers = [
nn.Linear(12, 5),
nn.Tanh(),
nn.Linear(5, 1),
nn.Tanh()
]
buffer_mask = [False, True, False, True]
architecture = BufferedSequential(layers, buffer_mask)
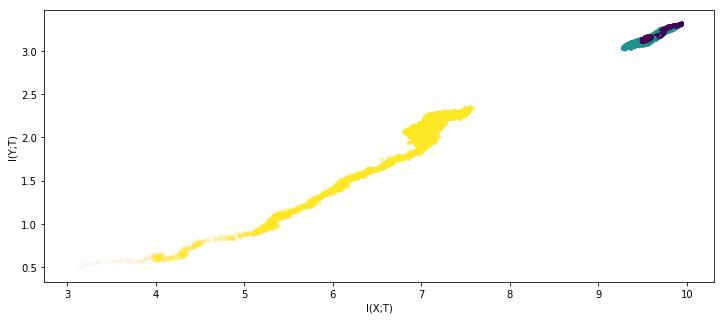
result_1layer = experiment(architecture, X, Y, epochs=300, network_copies=1, plot='dynamic')[0]


Different colors represent different layers of the neural network. As one can see, this network is too simple for the observations of Schvartz-Ziv and Tishby to manifest.
Experiment 2: As close to Tishby setup as possible
Six-layer perceptron, simple MI estimator, simple synthetic dataset
layers = [
nn.Linear(12, 10),
nn.Tanh(),
nn.Linear(10, 7),
nn.Tanh(),
nn.Linear(7, 5),
nn.Tanh(),
nn.Linear(5, 4),
nn.Tanh(),
nn.Linear(4, 3),
nn.Tanh(),
nn.Linear(3, 1),
nn.Tanh()
]
buffer_mask = [False, True, False, True, False, True, False, True, False, True, False, True]
tishby_architecture = BufferedSequential(layers, buffer_mask)
result_nets = experiment(tishby_architecture, X, Y * 2 - 1, epochs=1000, network_copies=1, plot='once')
100%|██████████| 1000/1000 [11:10<00:00, 1.49it/s]
For comparison, here are the results from the original paper:
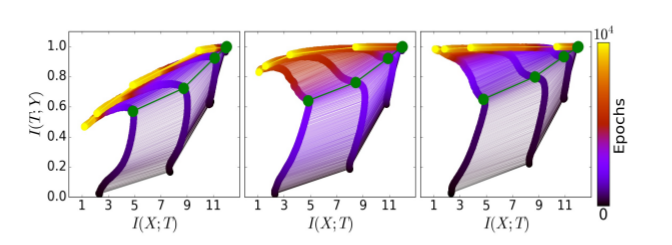
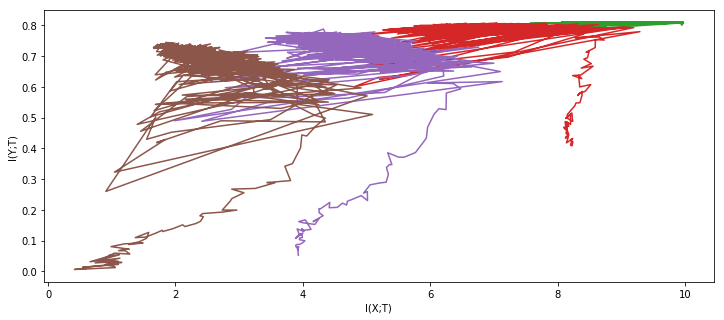
Indeed, the experiment reproduces successfully. But what if we use the same network architecture and the same data, but with our extended MI estimator ?
result_nets = experiment(tishby_architecture, X, Y * 2 - 1, epochs=1000, network_copies=5, plot='once')
100%|██████████| 1000/1000 [11:46<00:00, 1.42it/s]
Feel free to take a second to process the awe and admiration of this clearly superior method you are experiencing at the moment.
Experiment 3: Another dataset
Six-layer perceptron, extended MI estimator, complicated synthetic dataset
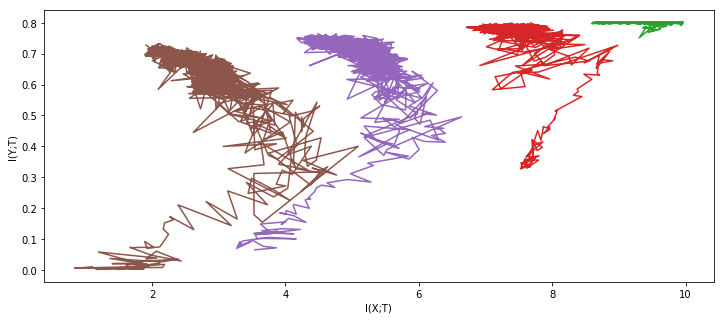
result_nets = experiment(tishby_architecture, X, Y_complicated, epochs=200, network_copies=5, plot='once')
100%|██████████| 200/200 [02:31<00:00, 1.32it/s]

Results reproduce
Experiment 4: (Almost) Real-world problem
For this experiment we will use:
- MNIST dataset of hand-written digits
- Convolutional neural network (1 conv layer, 1 ReLU layer, 2 fully connected layer)
- Extended mutual information estimator
layers = [
ReshapeLayer((-1, 1, 14, 14)),
nn.Conv2d(1, 1, (4,4)),
nn.MaxPool2d((3, 3)),
ReshapeLayer((-1, 9)),
nn.ReLU(),
nn.Linear(9, 10),
nn.Tanh(),
nn.Linear(10, 10),
nn.Softmax(dim=1)
]
buffer_mask = [False, False, False, False, False, False, True, False, True]
conv_architecture = BufferedSequential(layers, buffer_mask)
experiment(conv_architecture, X_mnist, Y_mnist, epochs=6000, network_copies=3, plot='dynamic')

100%|██████████| 6000/6000 [4:44:41<00:00, 2.85s/it]
[BufferedSequential(
), BufferedSequential(
), BufferedSequential(
)]
Bonus: mutual information stopping criterion
It felt wrong to end this project without a more or less practical (i.e. code you can use) result, so here it is: an algorithm for training neural networks that uses mutual information profile of the last layer \(I(X; \hat Y) - \beta I(\hat Y; Y)\) as its stopping criterion. Because, as already mentioned, MI estimators are very slow, we do not check this criterion at every iteration.
Code is attached
from tqdm import tqdm
def fit(network,
X,
y,
epochs=10,
epoch_length=10,
mi_tol=0.1,
beta = 1,
lr=.2,
batch_size=101,
activation_bins=np.linspace(-1,1,50),
loss = torch.nn.MSELoss()):
"""Use the mutual information of the last layer
as a stopping criterion when fitting a neural net"""
solver = torch.optim.SGD(params=network.parameters(), lr=lr)
infoplane = ZivInformationPlane(X, y, bins=activation_bins)
mi_last = 10e-20
for epoch in tqdm(range(epochs)):
for _ in range(epoch_length):
slice_ = np.random.permutation(range(len(X)))[:batch_size]
X_batch = Variable(torch.from_numpy(X[slice_])).float()
y_batch = Variable(torch.from_numpy(y[slice_, np.newaxis])).float()
solver.zero_grad()
pred_batch = network(X_batch)
loss(pred_batch, y_batch).backward()
solver.step()
mi_x, mi_y = mutual_information_for_network_family(infoplane, network_copies)[-1]
mi = mi_y - beta * mi_x
if mi - mi_last < tol * mi_last:
break
Conclusions
- Original experiment replicated successfuly
- Small changes to the original experiment didn’t change the results, but on very different (like the convolutional one) neural networks, the experiment turned out hard to reproduce. However, we cannot conclude that Shwartz-Ziv and Tishby’s results were erroneous , because there are other possible explanations like not having enough time and resources to run the experiment till stage 2
We have also introduced:
- An improvement of the mutual information estimator with several neural networks
- A new stopping criterion for neural network optimization
Contributions
- Vadim Liventsev - almost everything
- Leonid Kupchenko - a few slides, thoughts and prayers, valuable feedback
References
- Ravid Shwartz-Ziv, Naftali Tishby Opening the Black Box of Deep Neural Networks via Information
- Dan C. Cireşan, Ueli Meier, Jonathan Masci, Luca M. Gambardella, Jürgen Schmidhuber Flexible, High Performance Convolutional Neural Networks for Image Classification
Acknowledgements
Thanks to Skoltech’s Information and Coding Theory course and Prof. Frolov in particular for suggesting this research topic and supporting me along the way.